Collaboration with Joonhaeng Lee, Shiyao Sun, and Michael Ramirez
Professor: Chuck Hoberman
SCI 6476 | Transformable Design Methods
Harvard Graduate School of Design | Fall 2019
ABSTRACT
The objective of the project is to build a rapidly deployable pavilion mimicking the shape of the Droneport developed by a mix of professors and students from MIT, ETH, EPFL, Cambridge University, and the Norman Foster Foundation. When fully deployed, the structure creates a partially enclosed space with a detachable fabric cover; when fully closed, the pavilion can be compressed into a flat pack. The compatibility and ease of deployment allow easier transportation and prefabrication.
The catenary design of the arches provides a sense of structural levity and honesty, revealing clearly how forces flow throughout the structure. One of the structural challenges of the pavilion is its three cantilevered arches in the center, resulting in high stress in the connecting scissors. This structural consideration serves as a guideline for the orientation of the scissor linkages. To avoid failure in the linkages, we oriented the scissors vertically to ensure greater stiffness and resistance against self-weight.
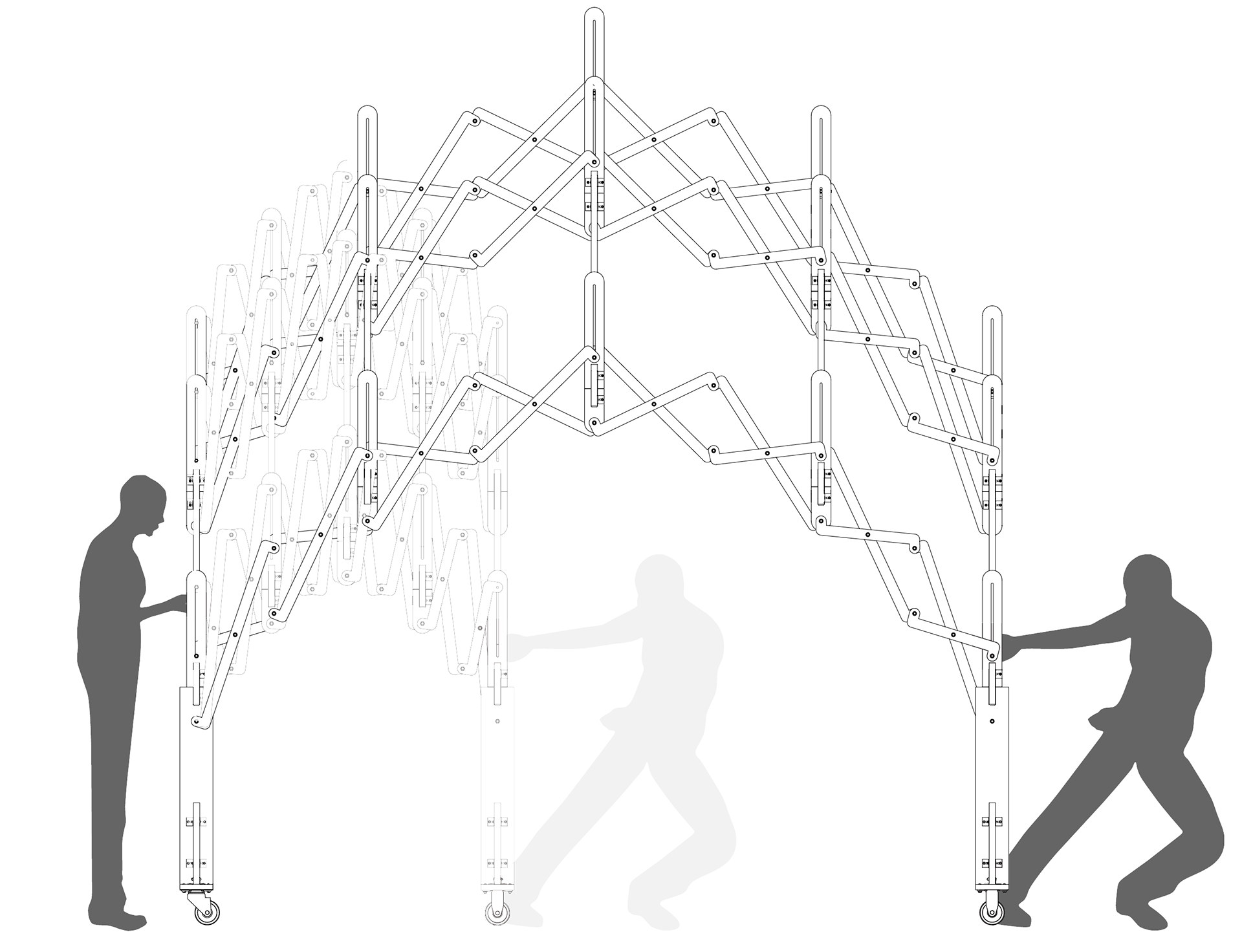
The deployment philosophy is to allow the five rigid arches connected by scissor linkages to expand and retract in synchrony. Through a series of trials and iterations, we introduced the implementation of slider-slots that stabilize the arches by eliminating the “swaying” motion from earlier iterations. The slider-slots later serve as anchors for the fabric cover. Furthermore, we increased the number of scissor pairs between arches from one to two after modeling the fifth iteration in Rhino. By doubling the frequency, we reduced the height of the slider-slots, and thus enabled better compaction. As a last step, the five arches are raised and supported on footings in each corner, providing better access underneath the pavilion.
Speculative Rendering

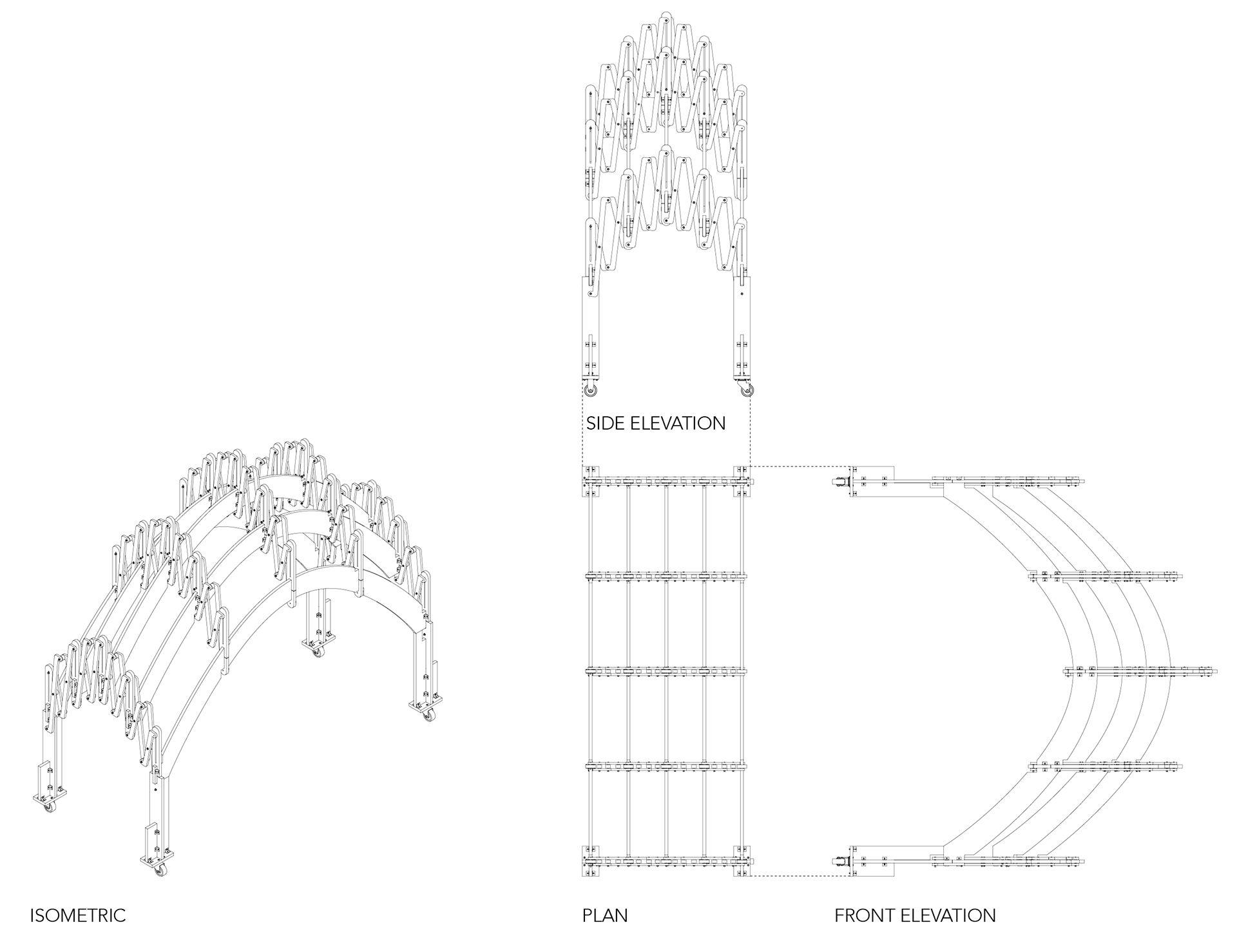
COMPRESSED
EXPANDED
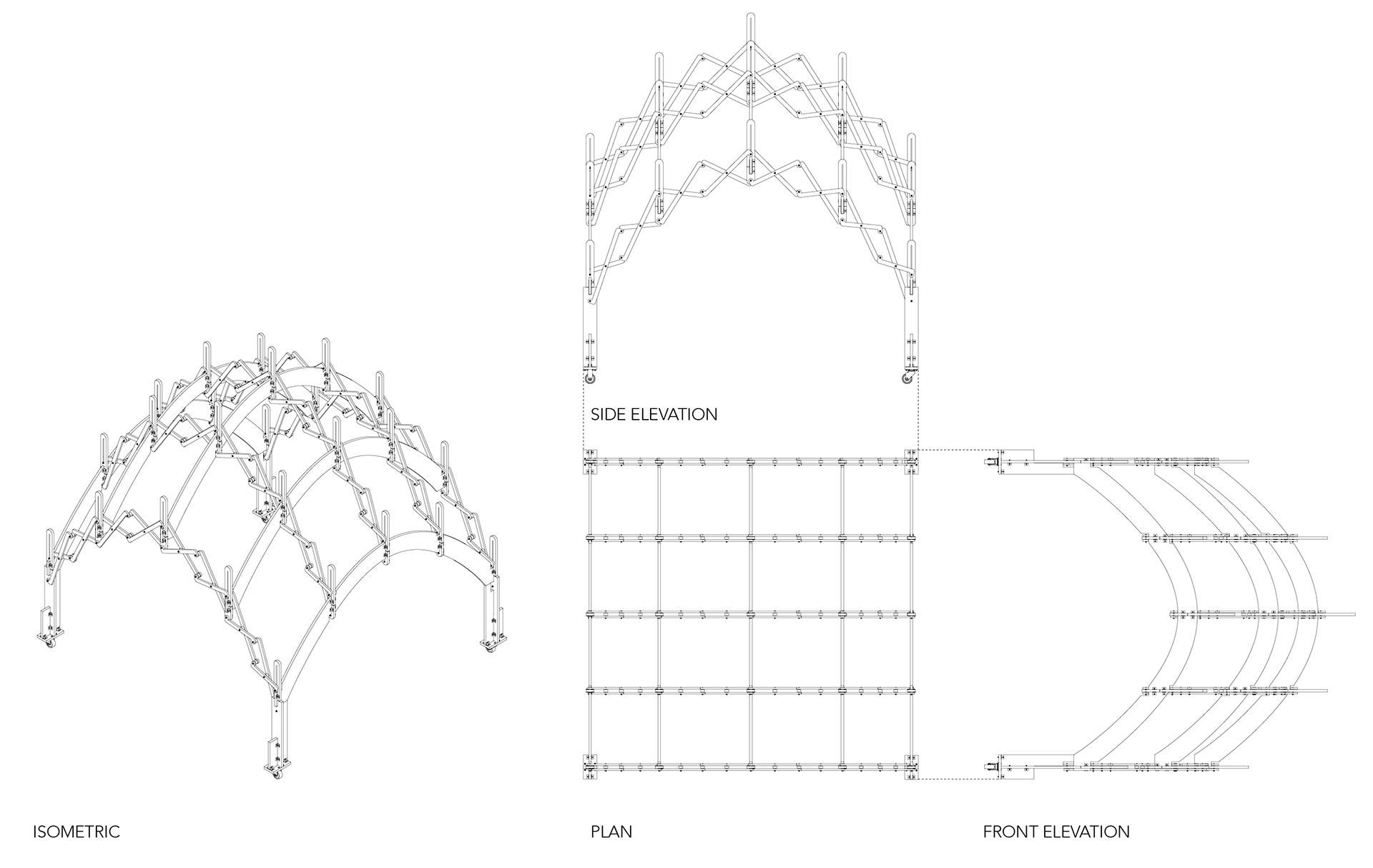
DEPLOYMENT DIAGRAM
ARCH AND SCISSOR ASSEMBLY

LEG AND COLUMN ASSEMBLY
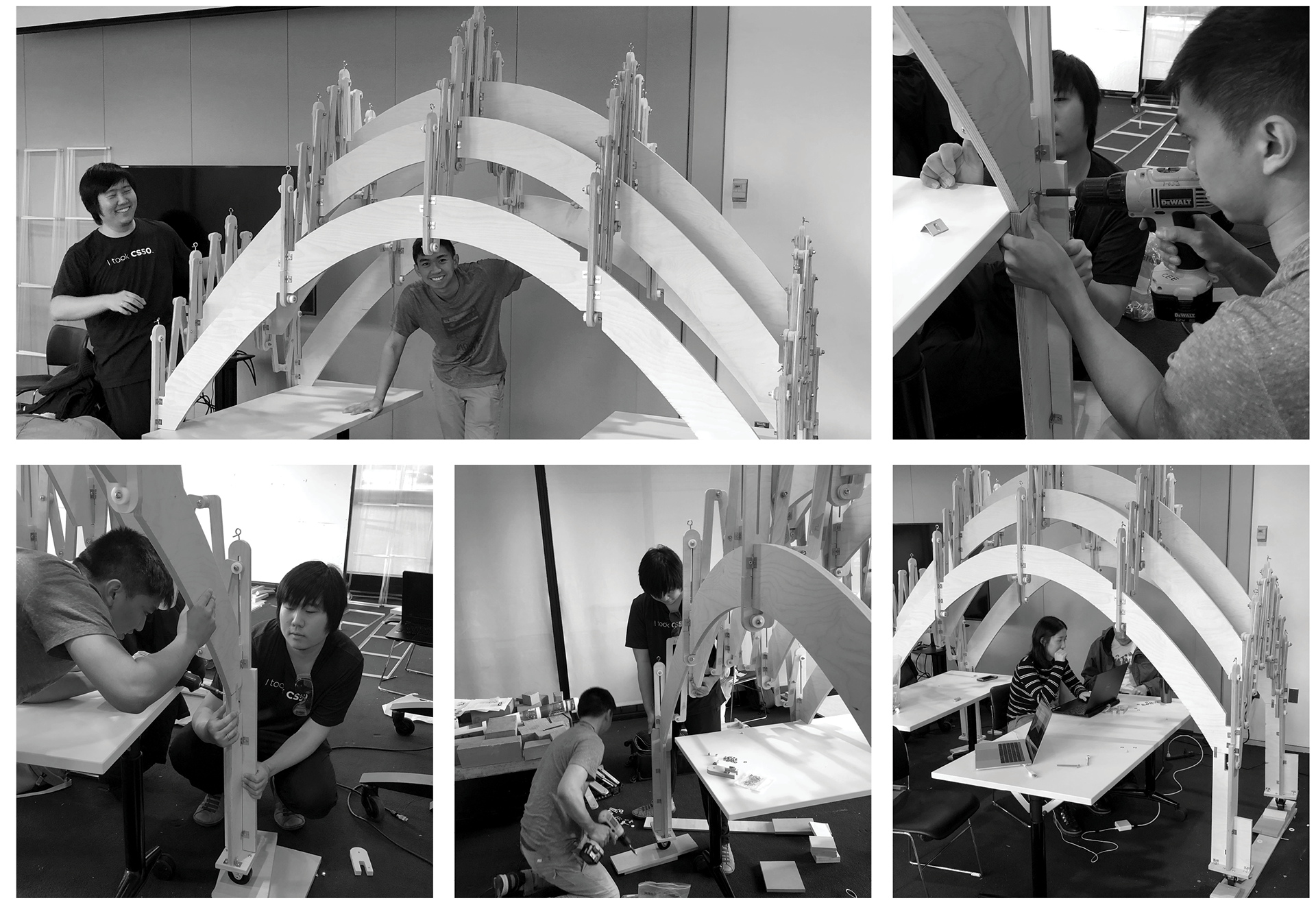
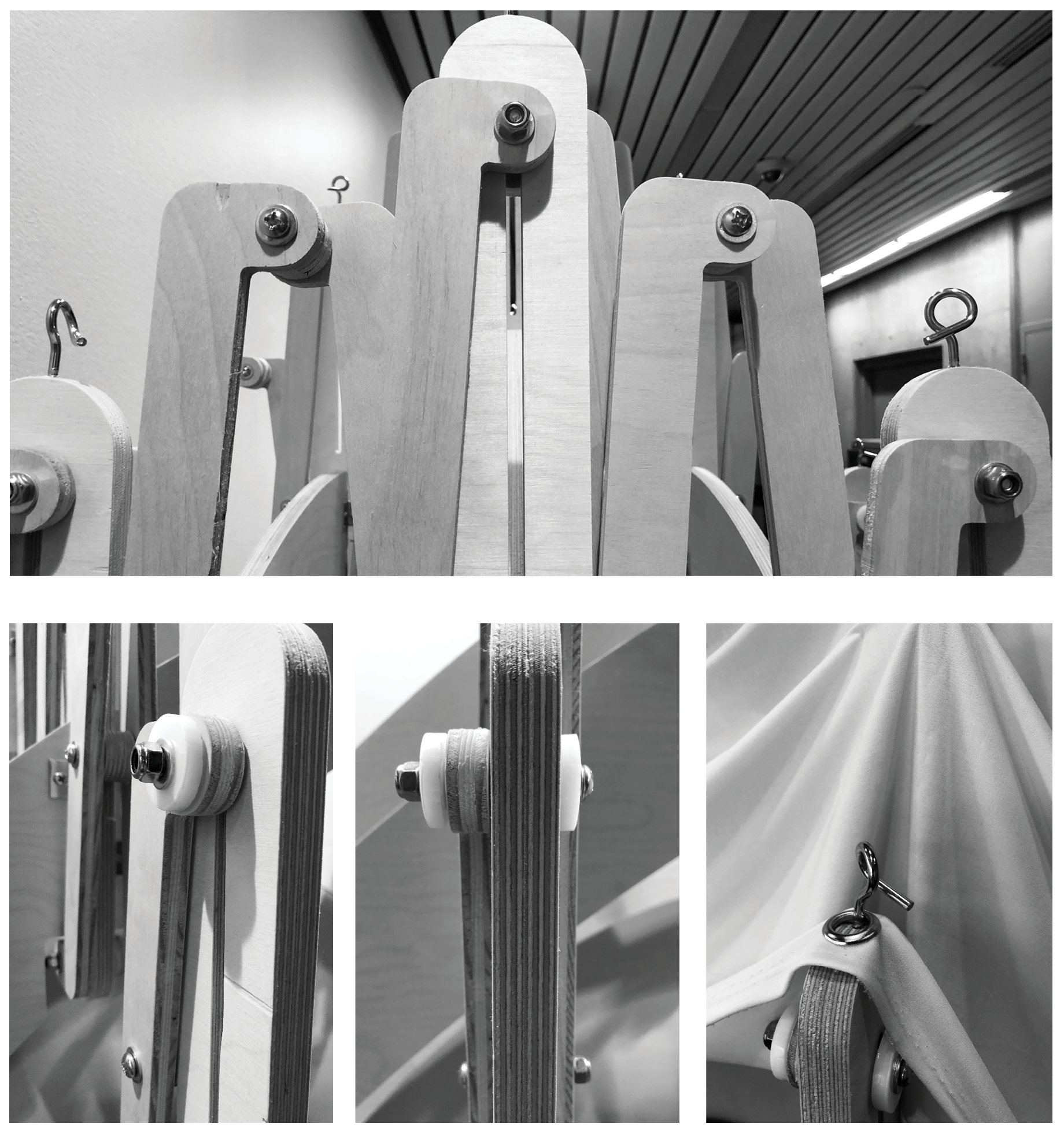
DETAIL PHOTOS
COMPRESSED

EXPANDED

Video of the Pavilion Being Compressed