Collaboration with Molly Mason
Professors: Jose Luis Garcia del Castillo Lopez and Zach Seibold
SCI 6365 | Enactive Design
Harvard Graduate School of Design | Spring 2020
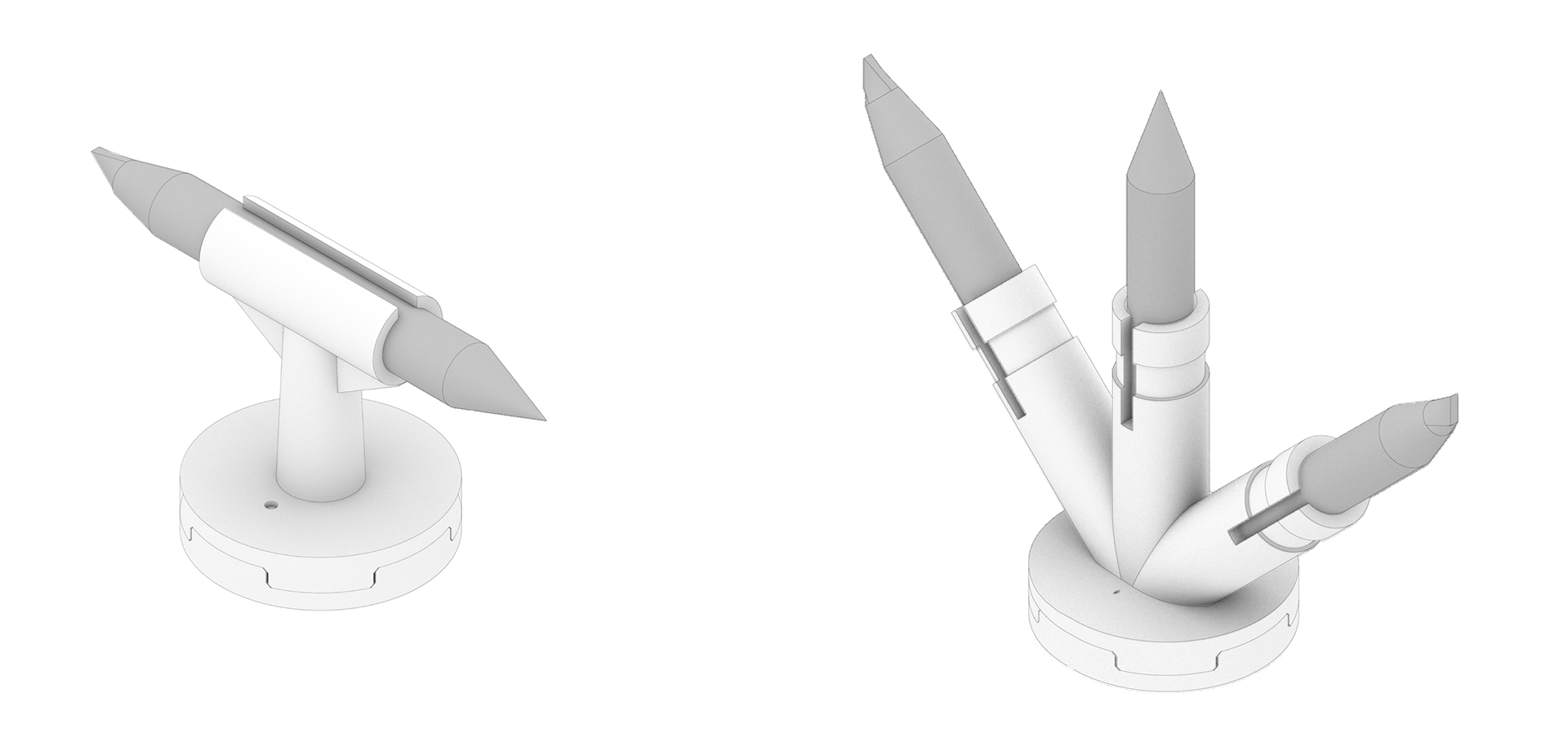
PARAMETRIC TOOL ATTACHMENTS
Two parametric tool attachment definitions were developed to allow for easier fabrication as well as the freedom to uses a variety of writing tools. The first tool was developed to accommodate a double-ended Prismacolor marker. The second was tool was developed to allow for easier tool change. Both Grasshopper definitions allow for the connection to the robot to be modified quickly so that they can easily be modified to work with other types of robotic arms.
TOOL ATTACHMENT USED
We used two tool holders for the project. The first one could hold a double ended Primamarker with a fine tip and chisel tip. When using the chisel tip, the tool was rotated an additional 20 degrees so the chisel was flush with the surface the paper. The second tool holder could hold three markers with different tip types.
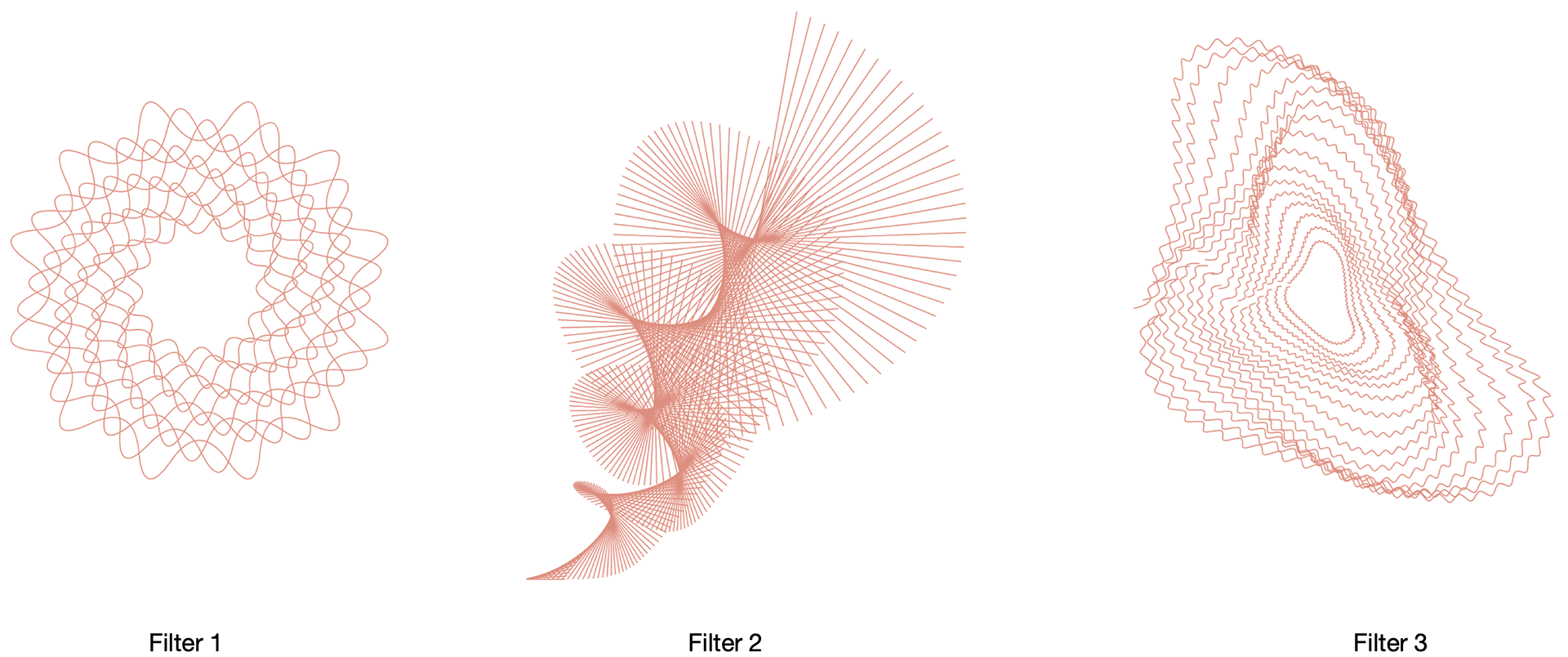
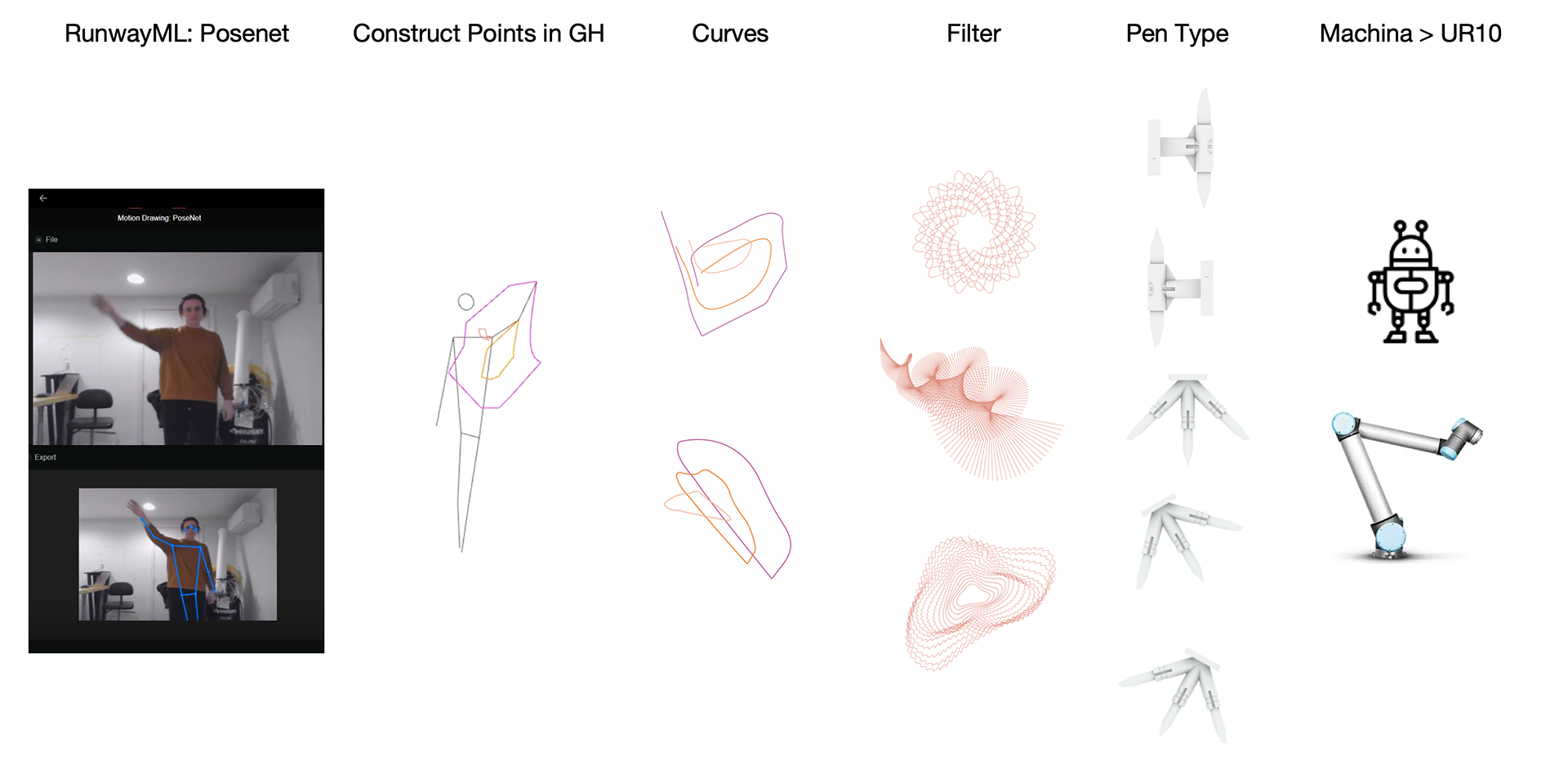
FILTERS
Three Filters were developed to transform the input curve. Each filter could support a closed or open curve.
WORKFLOW
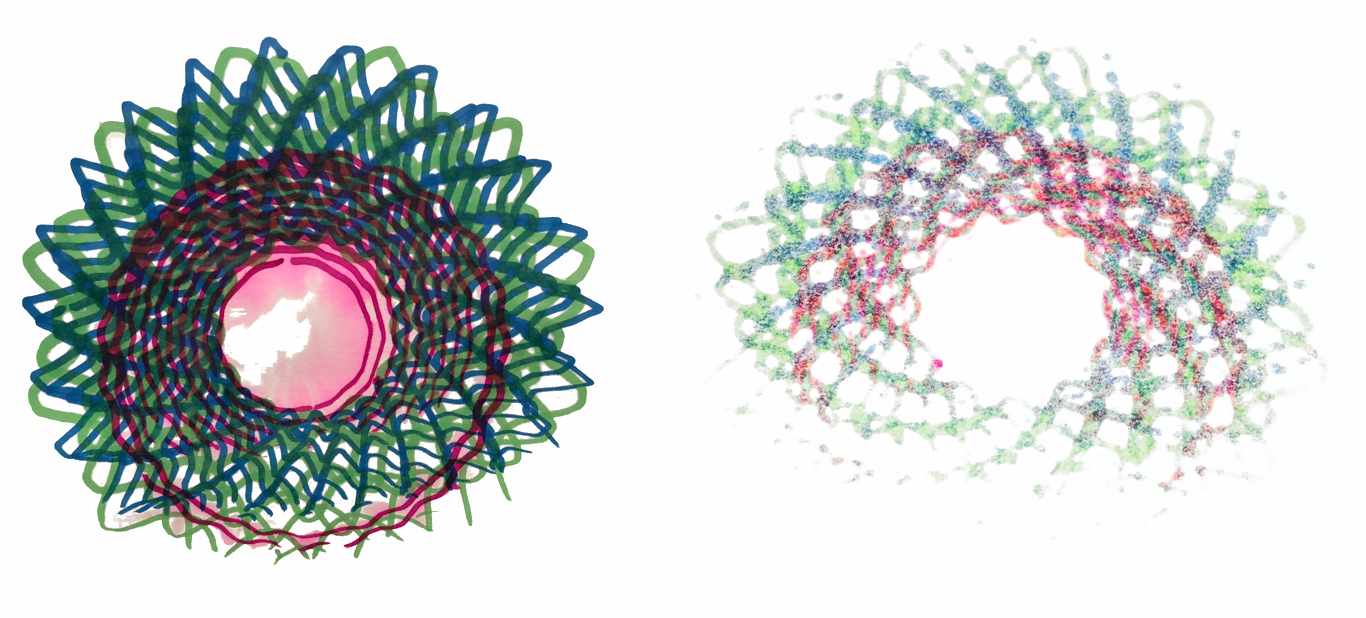
WATER TESTING
After an initial test water was used in an attempt to distort the marks. The results were not very promising except for the pattern created on the back of the paper.
DRAWING ONE | OVERLAYING
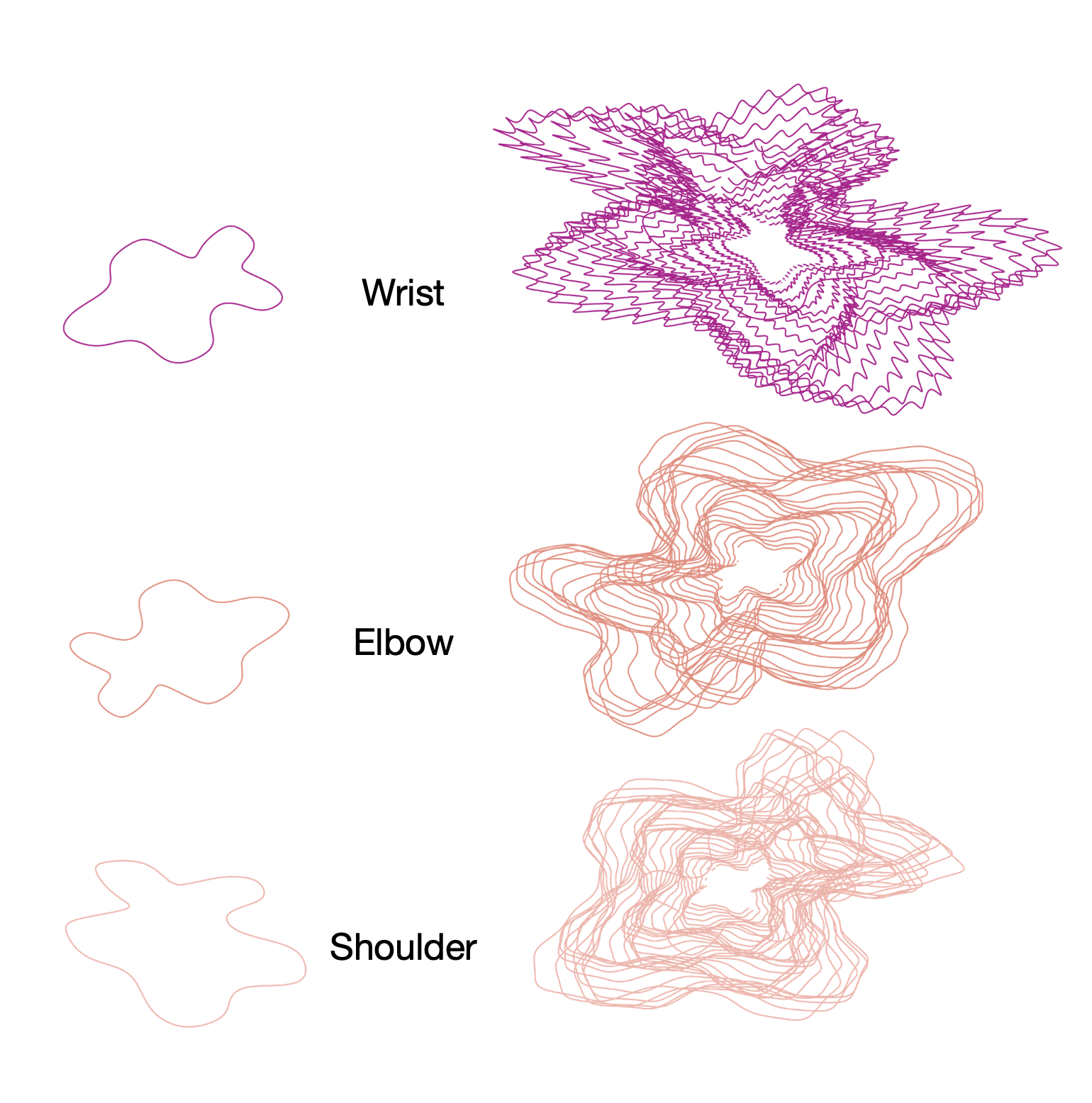
DRAWING TWO | ROTATING LINES ALONG AN INPUT CURVE
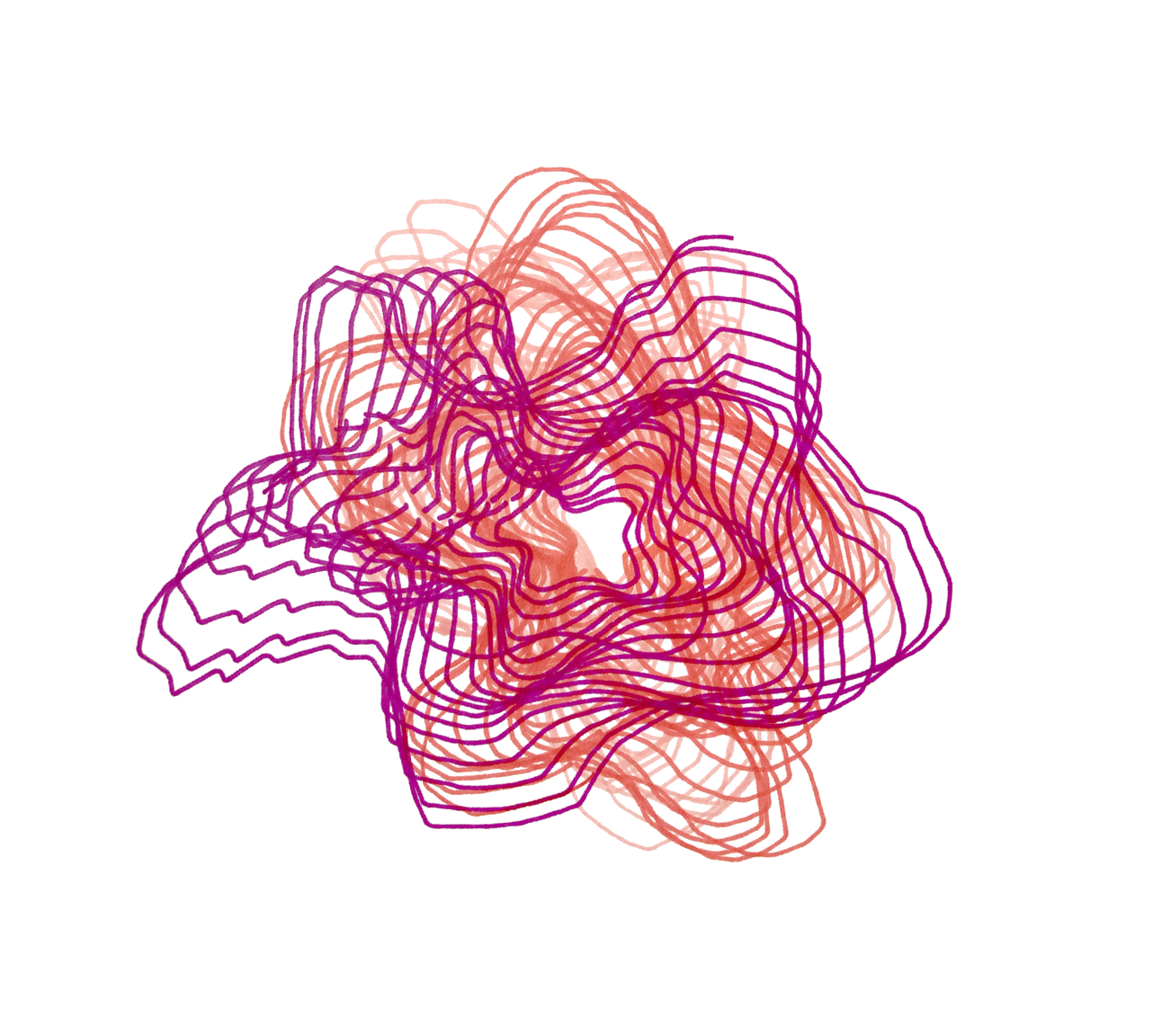
Drawing Three | Dashes
A filter was added that allowed for the creation of dashes. This filter emphasized the difference in densities of the lines. In addition it allowed for the creation of gaps in the layered drawings creating varying intersections.
DRAWING FOUR | THREE PEN TOOLHEAD